qtdc
Thượng tá

Bài viết: 3299
|
 |
« Trả lời #60 vào lúc: 05 Tháng Mười Hai, 2014, 10:48:16 pm » |
|
(tiếp)Các hệ số khuếch đại sơ bộ và các bất biến thời gian trong các phương trình của avtomat lực đẩy nhận được qua mô hình hóa trên MTĐT trước khi thử nghiệm trên bờ. Các đặc tính của avtomat lực đẩy được đánh giá từ quan điểm khả năng của nó giữ được góc tấn và tốc độ đối không yêu cầu trong quá trình cơ động trên tuyến đáp và cơ động theo hướng. Theo lệ thường, sẽ đòi hỏi phiên bản sau cùng của phương trình ban đầu của avtomat lực đẩy để nhận được {268} các đặc tính thỏa mãn. Nếu trong thời gian tiến hành các thử nghiệm trên bờ mà thu được các đặc tính thỏa mãn của avtomat lực đẩy, thì sẽ tiến hành thử nghiệm trong các điều kiện tàu sân bay, nhằm mục đích xác đinh ảnh hưởng của dòng chảy rối (dòng xoáy) phía sau tàu sân bay đến đặc tính của avtomat lực đẩy khi có những sai lệch dù nhỏ hay lớn về tuyến đáp và về hướng.  Cất cánh từ cầu bật tàu sân bay đề án 11435 "Đô đốc Hạm đội Liên bang Soviet N.G.Kuznetsov" 25 năm trước, ngày 1.11.1989 Cất cánh từ cầu bật tàu sân bay đề án 11435 "Đô đốc Hạm đội Liên bang Soviet N.G.Kuznetsov" 25 năm trước, ngày 1.11.1989Các hệ số khuếch đại và các bất biến thời gian khác nhau, được tạo ra bằng phương tiện điện khí, sẽ thay đổi khi cần để thu nhận được các đặc tính thỏa mãn. Chắc chắn tham số quan trọng nhất của avtomat lực đẩy là thành phần tính toán độ lệch bánh lái độ cao, vì chính nó sẽ loại trừ thời gian trễ của sự thay đổi góc tấn khi làm lệch bánh lái độ cao. Đã xác định rằng nhờ việc đưa vào các hằng số thời gian tương đối nhỏ (đặc trưng tần số cao) ta có thể đảm bảo các đặc tính tốt nhất của avtomat lực đẩy (autothrottle) và hằng số thời gian này nên nhỏ hơn khi tăng góc chúi dọc hơn là khi giảm nó. Tính chất này cung cấp cho phi công khả năng để điều chỉnh có hiệu quả vị trí của máy bay khi gặp phải các sai lệch so với tuyến đáp về phía dưới bằng cách tăng nhanh lực đẩy tại thời điểm ghì cần lái vào mình và làm chậm sự giảm lực đẩy khi phi công buông tay lái để dừng sự thay đổi góc chúi (nghiêng) dọc. Việc ngăn ngừa giảm lực đẩy quá mức sẽ giúp hệ thống phi công - máy bay - autothrottle xử lý thành công việc sửa các sai lệch đáng kể so với tuyến đáp (glissade) trong thời gian bay qua các túi khí loãng tạo ra bởi các xoáy không khí ngay sau tàu sân bay. Kết quả cuối cùng là điều khiển theo chiều dọc sẽ thay đổi lực đẩy một cách hiệu quả khi thực hiện điều chỉnh quỹ đạo đòi hỏi tăng góc tấn, và sẽ thay đổi lực đẩy không hiệu quả khi thực hiện điều chỉnh quỹ đạo đòi hỏi phải giảm góc tấn, dẫn đến không phải độ lệch cần lái so với thân mình, mà là độ giảm góc tấn sẽ trở thành thông số cơ bản, điều tiết việc giảm lực đẩy.  Phi công–thử nghiệm ОKB mang tên Sukhoi, AHLX V.G.Pugatchev, người đầu tiên hạ cánh Su-27K bằng cáp hãm trên sàn đáp TSB Đô đốc Kuznetsov hồi 13 giờ 46 phút ngày 1.11.1989 Phi công–thử nghiệm ОKB mang tên Sukhoi, AHLX V.G.Pugatchev, người đầu tiên hạ cánh Su-27K bằng cáp hãm trên sàn đáp TSB Đô đốc Kuznetsov hồi 13 giờ 46 phút ngày 1.11.1989Xoáy khí sau tàu sân bay thông thường đòi hỏi hệ số khuếch đại tương đối thấp và hằng số thời gian lớn trong kênh góc tấn. Khi máy bay đi qua vùng xoáy, sẽ xảy ra những thay đổi không mong muốn và bất quy tắc về góc tấn, gây ra sự cần thiết phải dich chuyển quá thường xuyên tay lái. Do đó, các hệ số khuếch đại và các hằng số thời gian trong kênh góc tấn là một sự thỏa hiệp giữa {269} các tham số mong muốn là hệ số khuếch đại cao - hằng số thời gian nhỏ để lái theo tuyến đáp trong bầu không khí yên bình và hệ số khuếch đại (hằng số thời gian) phải cần có để đảm bảo sự dịch chuyển thích hợp của cần lái máy bay. Các thông số về góc tấn và gia tốc tiêu chuẩn có ảnh hưởng ngược đến các tín hiệu đầu ra của thiết bị tính toán của autothrottle và chính chúng, đảm bảo chống rung cho bất kỳ chuyển động dao động nào, có thể phát sinh trong quá trình vận động trên tuyến đáp. Ví dụ, trong thời gian hiệu chỉnh có hạ thấp mũi (trả tay lái xa thân mình), việc giảm góc tấn gây giảm lực đẩy, và việc giảm gia tốc tiêu chuẩn làm tăng lực đẩy. 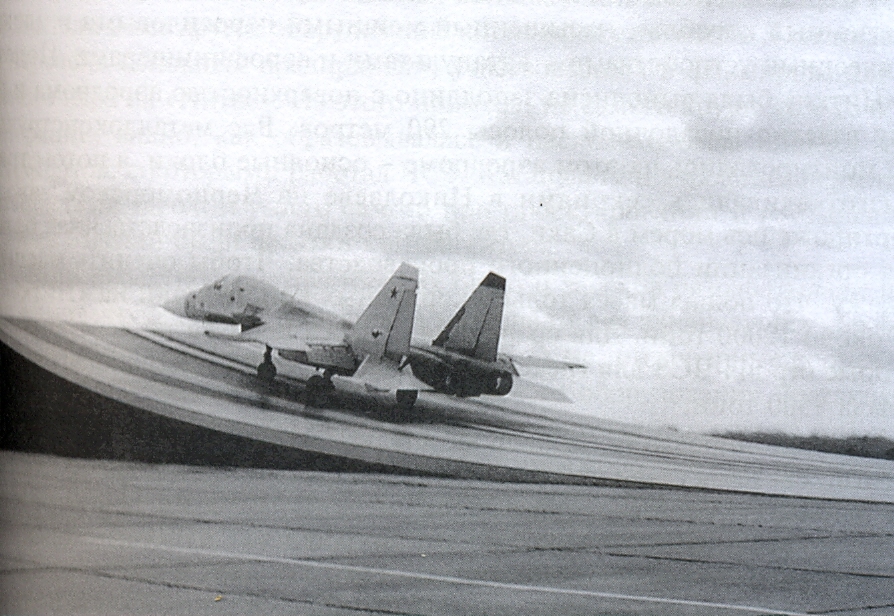 Su-27К cất cánh từ cầu bật «Nitka» trên đất liền Su-27К cất cánh từ cầu bật «Nitka» trên đất liềnNhư đã đề cập ở trên, hệ thống hạ cánh tự động trên tàu sân bay khi hoạt động trong một chu trình khép kín, sẽ đảm bảo quá trình vào hạ cánh hoàn toàn tự động từ thời điểm bắt vào chùm tia của đài radar đến khi tiếp đất thông qua việc điều khiển máy bay theo góc chúi dọc và nghiêng ngang phụ thuộc vào độ lệch khỏi tuyến đáp và hướng trong cả hai mặt phẳng thẳng đứng và nằm ngang. Thay đổi góc chúi dọc và góc nghiêng ngang thực hiện bằng hệ thống điều khiển tự động, còn việc kiểm soát tốc độ đối không trong khi cơ động - bằng autothrottle. Do đó cần có các đặc tính tần số riêng đủ thỏa đáng của máy bay khi có sự hiện diện hệ thống điều khiển tự động để đạt được đặc tính tần số đạt yêu cầu khi hoạt động trong chu trình kín có triển khai thực hiện phương trình điều khiển của hệ thống hạ cánh tự động. Các tần số riêng của dao động theo chiều dọc và ngang của máy bay và các hệ số tắt dần dao động (chống rung) trong chu trình mở được xác định bằng cách đo phản ứng của máy bay với các lệnh bậc thang về góc chúi dọc và nghiêng ngang và các lệnh hình sin ở các tần số khác nhau. Hệ số tắt dần "cần thiết" đại diện cho sự thỏa hiệp giữa các đặc tính tần số tồi theo phương thẳng đứng trên tuyến đáp, chúng cung cấp cho hệ thống bậc thang tắt dần quá cao, và các đặc tính tần số tồi theo phương đứng trên tuyến đáp, chúng cung cấp cho hệ thống bậc thang tắt dần yếu. Những đặc tính này của chu trình khép kín được xác định ở máy bay được điều khiển bởi hệ thống hạ cánh tự động, theo cách thức tương tự như các đặc tính trong chu trình mở. .........
|
|
|
|
« Sửa lần cuối: 06 Tháng Mười Hai, 2014, 12:39:43 am gửi bởi qtdc »
|
 Logged
Logged
|
|
|
|
qtdc
Thượng tá
Bài viết: 3299
|
|
« Trả lời #61 vào lúc: 10 Tháng Mười Hai, 2014, 12:52:25 pm » |
|
(tiếp)Sau khi thu được các đặc tính tần số đạt yêu cầu {270} trong vòng lặp khép kín sẽ thực hiện các cuộc hạ cánh trên căn cứ bờ ven biển để đánh giá tính chấp nhận được của điều kiện lái theo tuyến đáp và điều kiện tiếp đất của máy bay (ví dụ, vị trí không gian và tốc độ thay đổi của các thông số) trong các giới hạn của khu vực được phép tiếp đất trên boong. Có một khu vực nhất định phân tán các đặc tính trong chu trình của máy bay - hệ thống hạ cánh tự động khi hạ độ cao tuân theo tuyến đáp và phân bố phân tán các điểm tiếp đất trong các điều kiện vận hành khác nhau trên tàu sân bay từ sàn boong cố định và vận tốc trung bình của dòng khí trên boong 45-65 km / h đến sự dao động lắc khá lớn của sàn boong và tốc độ của dòng không khí trên 74 km / h. 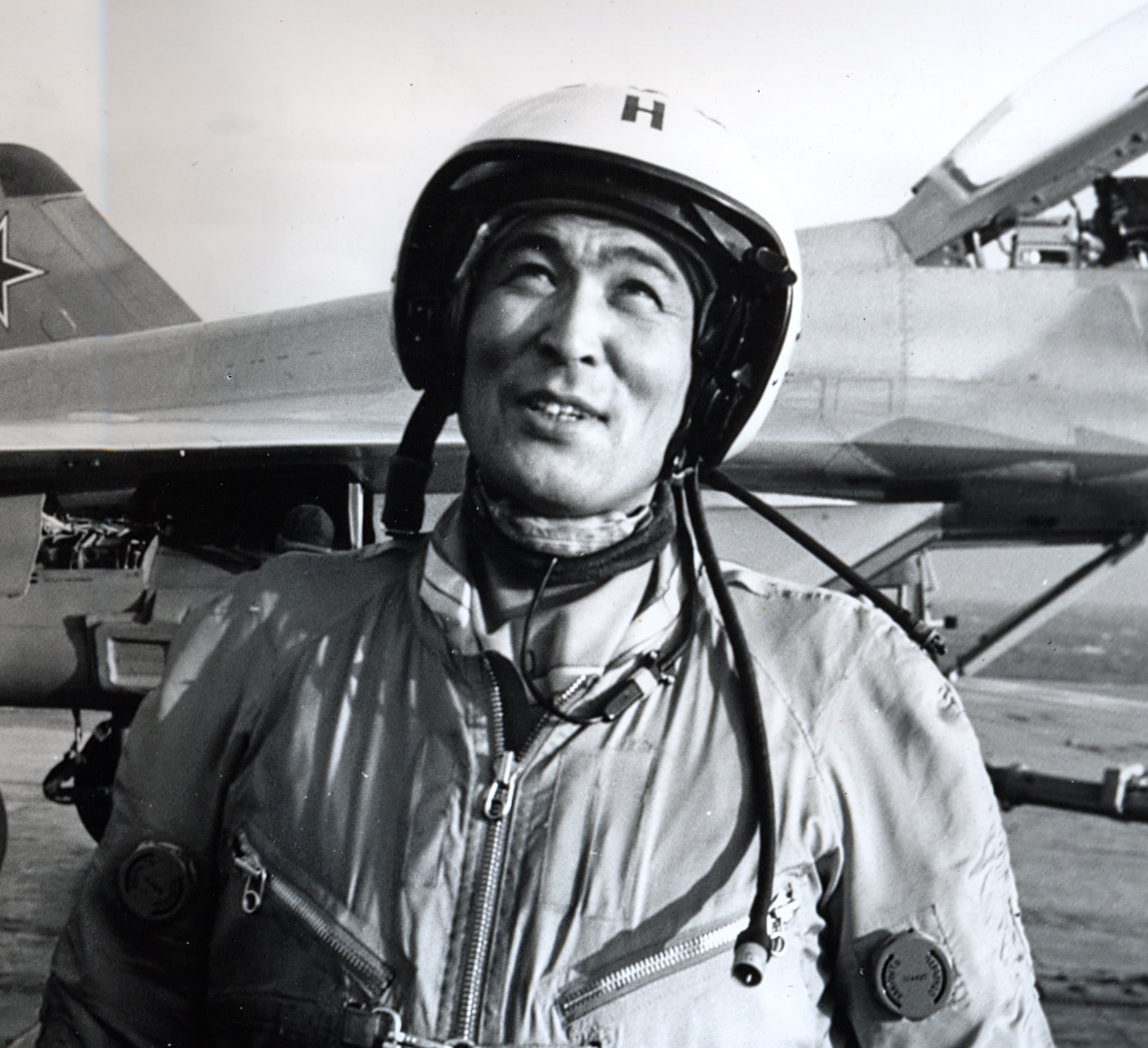 Phi công thử nghiệm ОKB mang tên Mikoyan Т.Abubakirov, người lần đầu tiên cất hạ cánh Mig-29K trên TSB "Đô đốc Kuznetsov" ngày 1 tháng 11 năm 1989, sau chiếc Su-27K của V.Pugachev. Phi công thử nghiệm ОKB mang tên Mikoyan Т.Abubakirov, người lần đầu tiên cất hạ cánh Mig-29K trên TSB "Đô đốc Kuznetsov" ngày 1 tháng 11 năm 1989, sau chiếc Su-27K của V.Pugachev.Các kết quả đánh giá cho thấy sự chảy rối rất mạnh, đi kèm với dao động lắc của sàn boong, và dòng không khí thổi mạnh có thể dẫn đến đặc tính điều khiển kém trong chu trình máy bay - hệ thống hạ cánh tự động. Bất kể kiểu điều khiển máy bay (nghĩa là bằng tay, hay qua cơ cấu autothrottle hoặc qua hệ thống tiếp cận hạ cánh tự động) được sử dụng trong quá trình tiếp cận hạ cánh, thường phải thực hiện động tác cơ động thoát sang vòng lượn thứ hai trong trường hợp khẩn cấp của quá trình tiếp cận hạ cánh, phát sinh khi máy bay đang đến gần tàu sân bay với vị trí không thuận lợi về không gian, tốc độ bay, và (hoặc) vận tốc hạ độ cao. Tính nghiêm trọng phụ thuộc vào tổn thất độ cao, thời gian đã sử dụng và khả năng điều khiển máy bay trong quá trình cơ động thoát ly do vị trí không thuận lợi. Để giảm thiểu việc điều khiển bằng tay thì khí tài lái lý tưởng sẽ gần như đưa động cơ sang chế độ lực đẩy tối đa và duy trì góc chúi không đổi cho đến khi bay bằng. Tuy nhiên, vì không đủ các đặc tính thỏa mãn của máy bay cho đến tận ngày nay nên người ta loại trừ việc áp dụng phương pháp này. Thường thì các cuộc thoát ly sang vòng lượn thứ hai được thực hiện tại các tốc độ đối không khác nhau (yêu cầu tốc độ đối không vào hạ cánh ± 18,5 km / h) và tốc độ giảm độ cao (tốc độ hạ độ cao trung bình ± 3 m / s) thông qua việc sử dụng máy lái, giả thiết sẽ đưa động cơ tới chế độ tối đa, duy trì không đổi góc tấn đã có khi vào tiếp cận hạ cánh, và để xác định các tổn thất độ cao và thời gian thích hợp cần thiết để đưa máy sang bay bằng. Nếu cần phải cải thiện đặc tính thoát sang vòng lượn thứ hai, {271} ta có thể áp dụng máy lái ít được mong muốn hơn, cho thấy sự gia tăng góc tấn của máy bay khi thoát ly so với giá trị đã có khi tiếp cận hạ cánh. Máy lái này còn nhược điểm, vì nó dẫn đến việc bắt không chủ ý cáp hãm của máy hãm ngay khi còn đang trên không (trước khi chạm vào sàn đáp) và yêu cầu phi công cơ động ở các góc tấn gần với góc tấn, tại đó xuất hiện khó khăn trong việc thực hiện điều khiển máy bay. Các kết quả thử nghiệm thu được trên các loại máy bay khác nhau đã chỉ ra rằng các đặc tính thoát ly sang vòng lượn thứ hai sẽ thỏa mãn trong trường hợp, nếu các tiêu chuẩn sau đây được thỏa mãn, chúng thu được trong quá trình thực hiện thoát ly sang vòng lượn thứ hai khi vào hạ cánh ở góc tấn yêu cầu: tổn thất chiều cao không quá 6 m; thời gian chuyển sang tư thế bay bằng không quá 2,5 giây khi gia tốc dọc 5,55 km / h / s tại nhiệt độ không khí 32 ° C; sự thay đổi kiểm soát được của góc chúi dọc máy bay không quá + 5 °. Còn một tính năng quan trọng của việc hạ cánh các máy bay hải quân trên hạm là hành vi của máy bay khi không bắt được cáp máy hãm. Mặc dù khí tài lái khi hạ cánh bình thường đòi hỏi phải chuyển vào chế độ lực đẩy tối đa khi tiếp đất, thao tác cơ động khi không bắt được cáp hãm là cực kỳ quan trọng trong điều kiện môi trường xung quanh khắc nghiệt (lưu lượng không khí thấp phía trên boong và nhiệt độ không khí cao) và các chế độ của máy bay (trọng tâm phía trước và tốc độ đối không thấp hơn tốc độ tối ưu khi vào tiếp cận hạ cánh), gây ra các đặc tính bay và khí động học không đủ đạt yêu cầu để ngăn chặn việc máy bay hạ thấp nguy hiểm ra ngoài mép boong chéo góc. Khoảng cách tối đa cho phép, mà trong đó sẽ xảy ra việc hạ thấp đó, phụ thuộc vào các kích thước của máy bay (dung sai giữa tàu và máy bay là tối quan trọng), nhưng không được vượt quá 3 mét. ..........
|
|
|
|
« Sửa lần cuối: 10 Tháng Mười Hai, 2014, 11:58:53 pm gửi bởi qtdc »
|
Logged
|
|
|
|
qtdc
Thượng tá
Bài viết: 3299
|
|
« Trả lời #62 vào lúc: 16 Tháng Mười Hai, 2014, 12:56:42 am » |
|
(tiếp)4.2. Hạ cánh thẳng đứng Các Bộ Tư lệnh Hải quân, chủ yếu là Hoa Kỳ và Vương quốc Anh, đang ra sức gia tăng sức mạnh chiến đấu cho các hạm đội, họ giành mối quan tâm lớn cho sự phát triển máy bay trên tàu sân bay, đặc biệt là cải tiến hoàn thiện các máy bay cất hạ cánh thẳng đứng hay cất cánh chạy đà và hạ cánh xả đà ngắn kiểu "Harrier", tạo ra các phương tiện mới đảm bảo bay cho chúng. {272} Như đang được nhấn mạnh trên báo chí nước ngoài, trong biên chế Hải quân Mỹ thì máy bay "Harrier" đóng căn cứ trên các tàu đổ bộ tấn công vạn năng loại "Tarawa" và các tàu đổ bộ chở trực thăng lớp "Iwo Jima", còn trong thành phần Hải quân Anh - chúng đóng căn cứ trên các tàu sân bay chống tàu ngầm loại "Invincible". Mặc dù các phi công của loại máy bay này được coi là khá nhiều kinh nghiệm, tuy nhiên, theo báo chí nước ngoài, không hiếm những trường hợp tai nạn xảy ra trong khi bay, đặc biệt là ở giai đoạn hạ cánh trên sàn đáp tàu sân bay vào ban đêm. Các chuyên gia hàng không hải quân Hoa Kỳ nhận xét rằng, vấn đề an toàn bay trên các máy bay loại "Harrier" được đảm bảo không chỉ bởi sự đào tạo chuyên môn ở mức độ cao cho các phi công, mà ở một mức độ đáng kể được đảm bảo bởi tính hoàn thiện của hệ thống chiếu sáng phục vụ hạ cánh trực quan trang bị trên tàu. Vì vậy, vấn đề phát triển hệ thống đó có một ý nghĩa đặc biệt. Trên báo chí nước ngoài, người ta lưu ý rằng hệ thống kỹ thuật chiếu sáng, có sẵn tại các tàu đổ bộ, không đảm bảo sự an toàn cho các chuyến bay đêm của loại máy bay "Harrier". Cũng cần lưu ý rằng, các hệ thống kỹ thuật chiếu sáng phục vụ hạ cánh được thiết lập trên các tàu sân bay với sự giúp đỡ của chùm ánh sáng, sẽ tạo hình tuyến đáp liệng, không đáp ứng được các yêu cầu an toàn bay của các máy bay. Điều này được giải thích bởi các lý do sau đây. Thứ nhất, các phi công rất khó để giữ cho máy bay cất hạ cánh thẳng đứng hoặc cất hạ cánh ngắn theo đúng tuyến đáp liệng trong thời điểm chuyển tiếp từ điều khiển máy bay theo thiết bị dẫn đường sang điều khiển theo thị giác, đặc biệt là khi hãm máy bay ở cự ly cách tàu khoảng 1500 m. Thứ hai, trên phân đoạn đáp liệng (cách tàu 13-15 km) máy bay bay ở chế độ chuyển tiếp với các vòi phun của động cơ ở tư thế quay xuống dưới. Đồng thời hầu hết trọng lượng của máy bay được nâng đỡ bởi lực đẩy của động cơ, chứ không phải là lực nâng của cánh, và thậm chí chỉ một chút thay đổi tốc độ (vòng quay) rotor của động cơ cũng dẫn đến sai lệch quỹ đạo bay so với đường lượn mong muốn. Phi công phải làm việc tích cực qua tay cần điều khiển để giữ máy bay trong chùm tia hẹp của tuyến đáp liệng (đường lượn), đó là một nhiệm vụ khó khăn.  Рис. 4.4. Оптическая система посадки самолетов вертикального взлета и посадки на палубу корабля Рис. 4.4. Оптическая система посадки самолетов вертикального взлета и посадки на палубу корабля
Hình 4.4. Hệ thống quang học hạ cánh của các máy bay CHC thẳng đứng trên boong tàu Thứ ba, ở cự ly cách tàu sân bay khoảng 2 km động cơ phun quay lệch 40-80 ° xuống dưới kèm theo thao tác lấy độ cao, và hệ quả là việc máy bay trượt ra khỏi đường lượn. Việc giảm số vòng quay rotor, như vẫn thường được thực hiện trên các máy bay thông thường, làm cho nó {273} lao xuống quá giới hạn dưới của chùm tia tuyến đáp liệng. Để tiến ra tuyến đáp lần nữa, cần tăng đáng kể vòng quay rotor của động cơ. Do đó, cố gắng của phi công giữ máy bay trên tuyến đáp liệng là nguyên nhân của các thay đổi không mong muốn góc tấn. Người ta cũng tin rằng hệ thống chiếu sáng boong tàu sân bay không đảm bảo cung cấp một phương pháp an toàn để bay treo và hạ cánh trong điều kiện đêm tối. Như báo chí phương Tây đã nêu, đến trước năm 1980 các phương tiện chính cho hạ cánh ban đêm trên tàu là: hệ thống định vị TACAN, radar hạ cánh, các thấu kính Fresnel, các đèn chiếu trong biên chế của tàu và các phương tiện chiếu sáng boong tàu. Các chuyến bay đêm trên máy bay "Harrier" được thực hiện chỉ trong các điều kiện khí tượng đơn giản khi có đủ nhiên liệu trong thùng chứa và có sân bay ven biển dự phòng. Các chuyên gia Anh đã đề xuất để thử nghiệm trên tàu sân bay chống tàu ngầm "Hermes" một hệ thống mới chiếu sáng cho hạ cánh ban đêm, sau đó nó đã được lắp đặt trên các tàu tấn công đổ bộ Mỹ lớp "Tarawa" để đánh giá thêm. Theo số liệu báo chí nước ngoài, nó bao gồm bốn yếu tố: bộ chỉ thị đường tiếp cận vào hạ cánh theo phương đường chân trời HAP1, bộ chỉ thị nhấp nháy đường tiếp cận vào hạ cánh PCOLS, bộ chỉ thị tư thế vị trí của máy bay trong chế độ bay treo HP1, bộ các đèn chiếu sodium. Hệ thống này tạo điều kiện dễ dàng cho các phi công lái máy bay ở các giai đoạn khác nhau của quá trình tiếp cận hạ cánh vào ban đêm và ban ngày trong các điều kiện khí tượng đơn giản cũng như phức tạp. Đèn chỉ thị hai màu đường vào tiếp cận hạ cánh trên tuyến đáp (glissade) (HAP1) chỉ cho phi công thấy vị trí của máy bay so với tuyến đáp liệng tối ưu. Nó bao gồm hai đèn công suất lớn nằm về phía mạn trái tàu ở cách nhau 91,5 m, mỗi đèn trong số đó được giữ ổn định trước dao động lắc và phân chia theo chiều cao bởi các thấu kính Fresnel thành hai phần bằng nhau (đỏ - dưới và trắng - trên). Nếu phi công đi vào vùng hoạt động của các đèn chỉ thị mà thấp hơn tuyến đáp xác định trước, anh ta sẽ nhìn thấy đèn màu đỏ ở phía trên đèn màu đỏ, nếu anh ta lên cao hơn tuyến đáp, sẽ thấy đèn màu trắng phía trên đèn màu trắng. Khi bay chính xác trên tuyến đáp, góc của nó là 2,1 °, phi công sẽ nhìn thấy đèn màu đỏ ở phía trên đèn màu trắng (Hình. 4.4). Trong điều kiện thời tiết trong sáng các đèn HAP1 sẽ nhìn thấy được ở khoảng cách 15 km và đảm bảo sự định hướng bổ sung thêm cho việc tiếp cận hướng hạ cánh. {274} ........
|
|
|
|
« Sửa lần cuối: 16 Tháng Mười Hai, 2014, 10:34:21 pm gửi bởi qtdc »
|
Logged
|
|
|
|
qtdc
Thượng tá
Bài viết: 3299
|
|
« Trả lời #63 vào lúc: 19 Tháng Mười Hai, 2014, 11:12:12 pm » |
|
(tiếp)Bộ đèn tín hiệu nhấp nháy chỉ thị tiếp cận vào hạ cánh (PCOLS, hình. 4.5), ngoài các đèn thông thường màu đỏ và trắng (như HAP1) còn có các đèn nhấp nháy màu đỏ màu trắng bổ sung (tương ứng với các ranh giới trên và dưới của tuyến đáp liệng quy định với góc khoảng 2,8 °). Nếu các đèn bố trí trên phần phía sau của cấu trúc thượng tầng được ổn định chống lắc, chúng có thể được nhìn thấy trong vòng cách tàu 5 km. Nếu máy bay tiến vào tuyến đáp từ phía dưới, phi công sẽ nhìn thấy đèn nhấp nháy màu đỏ, tiến vào cao hơn tuyến đáp - sẽ nhìn thấy đèn nhấp nháy màu trắng, nếu ở đúng trên tuyến đáp, phi công sẽ quan sát thấy đèn màu đỏ hoặc màu trắng vĩnh cửu, có nghĩa là anh ta nói chung đang tiếp cận đường đáp tốt, nhưng có phần thấp hơn một chút hay cao hơn một chút so với trục tối ưu của tuyến đáp liệng.  Рис. 4.5. Проблесковый индикатор захода на посадку корабельным СВВП Рис. 4.5. Проблесковый индикатор захода на посадку корабельным СВВП
Hình 4.5. Đèn tín hiệu chỉ thị tiếp cận hạ cánh của máy bay hải quân CHC thẳng đứng trên hạmBộ chỉ thị vị trí máy bay trong chế độ bay treo (HP1) được cài đặt ở phần phía sau của cấu trúc thượng tầng, và phi công có thể nhìn thấy nó từ cự ly khoảng 500 m trước khi hạ cánh tại điểm quy định trên sàn đáp. Bộ hiển thị này được giữ ổn định và giúp phi công xác định vào ban đêm tốc độ dịch chuyển tương đối của máy bay trong không gian ba chiều. Nó bao gồm tám đèn, bốn trong số đó xếp thẳng đứng chồng lên nhau (hai đèn trên màu trắng và hai đèn dưới màu vàng). Khoảng cách giữa chúng là 46 cm. Dãy đèn đứng giao nhau với dãy đèn ngang, gồm ba đèn màu xanh lá cây, cách nhau 75 cm. Đèn số 8 (định hướng) màu đỏ nhô ra khỏi dãy đèn đứng về phía đuôi tàu nằm trên một thanh dầm đặc biệt hướng góc 230 ° so với mặt phẳng xuyên tâm của tàu. Nhóm đèn này được sắp xếp trong ba mặt phẳng sẽ giúp các phi công vào ban đêm định hướng tốt hơn trong không gian ở giai đoạn hạ cánh cuối cùng và xác định chiều cao tối ưu. Người ta tin rằng sự hiểu biết về tốc độ di chuyển tương đối của các đèn với nhau khi hạ thấp, lên cao hoặc tiến gần đến chúng, sẽ làm dễ dàng hơn nhiều việc điều khiển máy bay từ thời điểm bay treo và trước khi kết thúc hạ cánh trên boong tàu. Bộ đèn chiếu Sodium là một phần không thể tách rời của toàn bộ hệ thống chiếu sáng, và theo ý kiến các chuyên gia phương Tây, làm tăng đáng kể hiệu quả của nó. Chúng bố trí trên boong thượng để chiếu sáng nơi hạ cánh, đảo thượng tầng của tàu và phần phía sau bằng ánh sáng đều như nhau, mà không làm chói mắt phi công và giảm thiểu tối đa số lượng bóng tối. Những chiếc đèn chiếu này không gây tác động tiêu cực đến các yếu tố khác của hệ thống chiếu sáng hạ cánh trực quan và cho phi công khả năng nhận thức ba chiều về con tàu từ cự ly 900 m, mà trong đó rất có thể phi công sẽ mất định hướng không gian. Người ta tin rằng việc xác định đúng đắn các kích thước và phối cảnh của con tàu trong các giai đoạn quan trọng của chuyến bay (các chế độ hãm và treo) là chìa khóa để hạ cánh an toàn trong các điều kiện ban đêm. ........
|
|
|
|
|
Logged
|
|
|
|
qtdc
Thượng tá
Bài viết: 3299
|
|
« Trả lời #64 vào lúc: 24 Tháng Mười Hai, 2014, 07:11:56 pm » |
|
(tiếp)Theo tài liệu Mỹ, quá trình hạ cánh {276} của máy bay "Harrier" trong điều kiện ban đêm diễn ra như sau. Việc tiếp cận lấy hướng hạ cánh được thực hiện theo hệ thống dẫn đường TACAN và mệnh lệnh của điều phối viên đài radar hạ cánh. Ở cự ly khoảng 15 km khi tầm nhìn tốt phi công sẽ tuân theo đèn báo mà hình NAP1 và đi vào tuyến đáp liệng ở độ cao khoảng 550 mét, cố gắng lái máy bay sao cho luôn luôn nhìn thấy đèn hiệu màu đỏ ở trên đèn hiệu màu trắng. Tốc độ bay được duy trì trong giới hạn 400 ... 450 km / h. Nếu phi công lái máy bay chính xác trên tuyến đáp, thì ở cự ly cách tàu khoảng 5 km sẽ thấy đèn tín hiệu PCOLS màu đỏ nhấp nháy. Ở cự ly 4 km, anh ta sẽ chuyển quan sát từ màn hình NAP1 sang PCOLS và khi góc chúi dọc là 8 ° anh ta sẽ bắt đầu hãm máy bay bằng cách quay các vòi xả động cơ 40 ... 80 ° xuống phía dưới. Máy bay sẽ lấy cao độ đột ngột và chuyển vào một tuyến đáp liệng khác, được hình thành bởi các đèn tín hiệu PCOLS. Tốc độ được dần dần giảm xuống mức 150 ... 200 km / h. Phi công cố gắng giữ cho máy bay bay đúng trên tuyến đáp sao cho nhìn thấy đèn hiệu màu đỏ hoặc màu trắng phát sáng liên tục, trong khi tránh hiện tượng "rơi hẫng" máy bay và bị chệch khỏi tuyến đáp liệng tối ưu. Khi đường bay trở nên ổn định, động cơ phải được chuyển sang chế độ hoạt động khác sao cho tốc độ hạ độ cao khoảng 2 m / s.  Рис. 4.6. Характер изменения бортовой качки и качки по высоте корабля типа эсминец: Рис. 4.6. Характер изменения бортовой качки и качки по высоте корабля типа эсминец:
1 — по высоте; 2 — по углу γ
Hình 4.6. Tính chất biến thiên dao động lắc và lắc theo chiều cao của tàu khu trục:
1- theo chiều cao; 2- theo góc gammaỞ cự ly cách tàu khoảng 500 m, phi công sẽ chuyển quan sát sang đèn hiệu màn hình HP1 và hạ xuống độ cao khoảng 45 m, cho đến khi nào chưa nhìn rõ con tàu được chiếu sáng. Sau đó, được hướng dẫn trực quan nhờ đèn hiệu màn hình HP1, anh ta chuyển máy bay sang chế độ bay treo ổn định và khi góc chúi dọc 7,5 ° sẽ thực hiện hạ cánh. Theo thông tin báo chí, mặc dù có các công tác đã thực hiện nhằm cải thiện các yếu tố cơ bản của hệ thống chiếu sáng hạ cánh trực quan cho máy bay "Harrier" về ban đêm trên tàu đổ quân "Tarawa", công việc này vẫn chưa thể được coi là đã hoàn thiện, đáp ứng được các yêu cầu về an toàn bay, đặc biệt trong các điều kiện thời tiết bất lợi. Công tác cải tiến nó vẫn đang tiếp tục.  Рис. 4.7. Модель дозвукового СВВП с тремя реактивными соплами для исследований характера воздействия выходных струй при наличии качки корабля: Рис. 4.7. Модель дозвукового СВВП с тремя реактивными соплами для исследований характера воздействия выходных струй при наличии качки корабля:
1 — подъемный вентилятор; 2 — подъемно-маршевые вентиляторы
Hình 4.7. Mô hình máy bay VTOL cận âm có 3 vòi xả để nghiên cứu tính chất tác động dòng khí xa khi tàu đang dao động lắc:
1- quạt nâng; 2- các quạt nâng-hành trìnhKhi sử dụng các máy bay cất cánh và hạ cánh thẳng đứng từ tàu chiến, đặc biệt các tàu nhỏ kiểu tàu khu trục, có thể phát sinh một loạt vấn đề kỹ thuật nghiêm trọng liên quan đến tính chất phức tạp trong sự chuyển động của boong tàu và tác động của nó đối với sự thay đổi lực nâng {277} của máy bay VTOL, các mô-men kháng và kết quả là ảnh hưởng tới sự ổn định và khả năng kiểm soát máy bay. Khi treo máy bay gần boong tàu và khi có các di chuyển không gian phức tạp của boong tàu (dịch chuyển theo phương thẳng đứng, lắc đuôi và lắc mạn) thì vị trí hình học của máy bay so với boong sẽ biến đổi, mà điều này gây ra sự thay đổi trong hiệu ứng hút khí trên các bộ phận khác nhau của máy bay, tác động của hiệu ứng đài phun. Để khám phá các đặc điểm tác động của dòng phản lực lên máy bay khi boong dao động lắc, ở Hoa Kỳ người ta đã thực hiện các nghiên cứu thực nghiệm các hiệu ứng này trên mô hình với các tính chất chuyển động khác nhau của boong tàu. Nghiên cứu được tiến hành bằng cách sử dụng các mô hình máy bay với bố cục cận âm và siêu âm. Trong các nghiên cứu, người ta giả lập dao động lắc sống, lắc mạn và dao động thẳng đứng của boong tàu. Các thử nghiệm được thực hiện trong dải biên độ và tần số tương ứng với dao động lắc của loại tàu khu trục ở điều kiện biển động trung bình và có bão (sóng cấp 3 ... 5). Các lực và mô-men tác động lên mô hình máy bay này được đo bằng các cân điện tử khí động học sáu thành phần (Шестикомпонентные аэродинамические весы). Biên độ và tần số dao động của boong được mô hình hóa. Hệ số quy mô biên độ dao động ~ 0,05, còn tần số dao động - tỷ lệ nghịch với hệ số quy mô các kích thước hình học của mô hình và quan hệ của tốc độ dòng chảy đầy đủ quy mô của tốc độ dòng chảy thực ngoại cảnh với tốc độ của mô hình. Ví dụ, một tần số dao động thực ngoại cảnh của boong 1/8 Hz là tiêu biểu cho dao động lắc mạn và đòi hỏi tần số dao động 2.2 Hz trên mô hình.  Рис. 4.8. Модель сверхзвукового СВВП: Рис. 4.8. Модель сверхзвукового СВВП:
1, 2 — подъемно-маршевые двигатели с поворотными соплами
Hình 4.8. Mô hình máy bay VTOL siêu âm:
1, 2- các động cơ nâng-hành trình có vòi xả quay đượcChuyển động của boong được mô phỏng nhờ luật chuyển động hình sin của sóng biển. Trên hình 4.6 biểu diễn tính chất biến thiên của dao động lắc mạn và dao động lắc theo chiều cao của tàu chiến loại khu trục hạm. Trong khi tiến hành nghiên cứu người ta sử dụng hai mô hình máy bay VTOL cận âm với ba vòi xả phản lực: một vòi khối tích ba chiều, vòi kia phẳng hai chiều, chúng mô phỏng máy bay cất cánh và hạ cánh thẳng đứng có ba quạt gió (hình 4.7). Một quạt nâng số 1 nằm trong phần mũi của máy bay và quạt nâng-hành trình số 2 nằm trên phần phía sau của cánh sát thân máy bay. Người ta cũng nghiên cứu mô hình máy bay siêu âm (hình. 4.08). Mô hình này là một mô hình phẳng theo chu tuyến có phần dưới thân dạng khối tích. Trong mô hình này, hai động cơ nâng-hành trình 1 tới 2 có các vòi xả quay được ở phần đuôi và một quạt nâng - ở phần trung tâm thân máy bay.  Рис. 4.9. Зависимость изменения подъемной силы СВВП от относительной высоты положения самолета при неподвижной палубе корабля Рис. 4.9. Зависимость изменения подъемной силы СВВП от относительной высоты положения самолета при неподвижной палубе корабля
Hình 4.9. Quan hệ phụ thuộc giữa sự biến thiên lực nâng của máy bay VTOL vào độ cao tương đối của vị trí máy bay khi boong tàu cố địnhKhi boong ở tư thế cố định (stationary), quan hệ phụ thuộc giữa sự thay đổi lực nâng (ΔY / P) vào cao độ tương đối của mô hình máy bay ở phía trên bề mặt sân cất-hạ cánh (H / De) được thể hiện trên hình 4.9. Ở đây De - đường kính tương đương của tất cả các vòi xả động cơ, tức là đường kính của một vòi xả, mà diện tích tiết diện đầu ra của nó bằng tổng diện tích các mặt cắt của ba vòi xả. Trên hình vẽ này cho thấy các điểm chỉ ra tính lặp lại tốt của các kết quả. Sự phụ thuộc này là điểm khởi đầu để so sánh với các kết quả thu được khi boong chuyển động. Như ta thấy từ hình 4.9, ở gần boong tại độ cao gần với độ cao của sát-xi, hiệu ứng hút dòng xả chảy lan làm giảm lực nâng khoảng 3% lực đẩy thẳng đứng của thiết bị phát lực. Tùy theo mức độ đạt đến độ cao bằng hai lần đường kính tương đương của vòi xả, tỷ số giữa gia số lực nâng với lực đẩy ban đầu của thiết bị động lực sẽ tăng 1,5% do tác động của đài phun, hình thành do tương tác của các dòng khí xả. Ở xa bề mặt sân đậu đài phun sẽ không hoạt động, và do đó lực nâng chỉ chịu tổn thất nhỏ do hiệu ứng hút dòng khí xả là 0,5. Các lực liên quan hoạt động của đài phun và hiệu ứng hút, có thể đánh giá được bằng cách sử dụng mô hình thử nghiệm của phần dưới bao gồm phần thân máy bay, giới hạn trong ba vòi xả. .........
|
|
|
|
« Sửa lần cuối: 25 Tháng Mười Hai, 2014, 08:54:10 pm gửi bởi qtdc »
|
Logged
|
|
|
|
qtdc
Thượng tá
Bài viết: 3299
|
|
« Trả lời #65 vào lúc: 26 Tháng Mười Hai, 2014, 12:14:00 am » |
|
(tiếp)Vì đài phun tác động vào máy bay, tập trung đúng ở khu vực hình thành lực nâng vốn được đo trong khu vực này, nó sẽ mô tả lực tác động của đài phun. Lực tác động của hiệu ứng hút, có thể được tính bằng cách trừ đi lực của đài phun, đo ở phần dưới thân máy bay, trong tổng số lực nâng đo trên toàn bộ mô hình.  Рис. 4.10. Зависимость изменения коэффициента момента тангажа от угла а килевого наклона палубы корабля Рис. 4.10. Зависимость изменения коэффициента момента тангажа от угла а килевого наклона палубы корабля
Hình 4.10. Sự phụ thuộc của biến thiên hệ số mô men chúi dọc vào góc nghiêng theo sống tàu của sàn boongDễ dàng thấy rằng sơ đồ ba vòi xả này tạo ra một đài phun vừa phải, làm tăng lực nâng khoảng 5% ở độ cao bằng 1,5 lần đường kính của vòi xả. Giá trị tính toán của lực tác động của hiệu ứng hút ở độ cao này bằng 4%. Kết quả ta có gia số tăng tổng cộng lực nâng là 1%. Sự thay đổi hệ số mô men chúi dọc của mô hình khối tích cận âm được chỉ ra trên hình 4.10 như là hàm số của góc nghiêng dọc sống của boong tàu. Gần boong mô men bổ nhào sẽ phụ thuộc rất nhiều vào góc nghiêng của sống tàu. Điều này gắn với việc tăng cường tác động của hiệu ứng hút gần hai vòi xả phía sau. Ở độ cao gần với độ cao sát-xi (H / De = 0,8), hiệu ứng hút tăng cường này ở phía đuôi sẽ dẫn đến sự xuất hiện một mô men âm hay mô men chúi dọc bổ nhào. Tại độ cao tương ứng với lực tối đa của đài phun (H / De = 2), một góc nghiêng boong giá trị âm gây ra sự thay đổi mô men chúi dọc từ dấu dương sang mang dấu âm. Chắc chắn điều đó có nguyên nhân do hiệu ứng hút {281} ở phần mũi và sự dịch chuyển điểm tác động của đài phun về phía sau. Khi H /De lớn hơn 5 độ nhạy với góc nghiêng của boong là không đáng kể.  Рис. 4.11. Зависимость изменения подъемной силы (а) и коэффициента момента крена (б) от угла γ бортового наклона палубы корабля Рис. 4.11. Зависимость изменения подъемной силы (а) и коэффициента момента крена (б) от угла γ бортового наклона палубы корабля
Hình 4.11. Sự phụ thuộc của biến thiên lực nâng (a) và hệ số mô men nghiêng ngang (b) vào góc nghiêng mạn gamma của boong tàuNhư thể hiện trên hình 4.11, gần boong lực nâng cảm ứng và hệ số mô men nghiêng ngang thay đổi đáng kể tùy thuộc vào góc nghiêng ngang của sàn boong. Những tổn thất đáng kể của lực nâng sẽ xảy ra ở những góc nghiêng ngang lớn hơn 2 °. Điều này liên quan đến tổn thất lực nâng của đài phun khi nó dịch chuyển nghiêng, cả với boong, cũng như khi hiệu ứng hút tăng dưới cánh gần với boong. Tổn thất lực nâng kèm theo mô men nghiêng làm mất ổn định có cùng xuất xứ. Cũng như trong trường hợp góc nghiêng dọc, ảnh hưởng của góc nghiêng ngang của boong là nhỏ ở các độ cao lớn hơn năm lần đường kính vòi xả. Để xác định mức độ tương tự của mô hình cho việc nghiên cứu các hiệu ứng khí động học của cấu hình cận âm, người ta đã thử nghiệm dưới dạng: khối tích đầy đủ 3 mô hình, khối tích nửa đầy đủ 2 mô hình với khối tích đầy đủ phần thân dưới và phần đuôi, và phẳng đơn 1 mô hình chu tuyến có phần đuôi. Các kết quả được đưa ra trên hình 4.12 minh họa cho ảnh hưởng của hình dạng thân máy bay. Mô hình chu tuyến phẳng có giá trị mức tăng lực nâng gần boong tàu cao hơn đáng kể, mặc dù lực nâng tối đa cũng đạt được ở khoảng cùng một cao độ.  Рис. 4.12. Зависимость изменения подъемной силы от относительной высоты положения СВВП над палубой корабля при различных формах исследуемых моделей Рис. 4.12. Зависимость изменения подъемной силы от относительной высоты положения СВВП над палубой корабля при различных формах исследуемых моделей
Hình 4.12. Sự phụ thuộc của biến thiên lực nâng vào độ cao tương đối của vị trí máy bay VTOL phía trên boong tàu với các dạng mô hình khác nhau được khảo sátCác đặc trưng của mô hình khối tích đầy đủ ba chiều, ghi nhận ở vùng đặt lực đài phun, cho thấy rằng lực nâng của đài phun nhỏ hơn nhiều so với ở mô hình phẳng. Số liệu của mô hình nửa khối tích rất khớp với dữ liệu của mô hình khối tích cho đến độ cao bằng 1,5 lần đường kính vòi xả, thấp hơn cao độ này thì mô hình nửa khối tích có được gia số lực nâng lớn hơn 1,5-2%. Lực nâng cao hơn liên quan đến lực đài phun lớn hơn trên bề mặt phẳng của phần kéo dài của thân máy bay, được sử dụng để mô phỏng phần đuôi. Ảnh hưởng của hình thức phần trên của thân máy bay là rất nhỏ. Lực đài phun có thể tăng lên một cách hiệu quả bằng cách lắp đặt thiết bị tăng lực nâng tại phần bề mặt dưới thân máy bay như đã làm ở máy bay AV-8B «Harrier». Trong quá trình các thử nghiệm trên đã sử dụng hệ thống ba tấm chắn tăng lực nâng. Kết quả ảnh hưởng của nó đến giá trị lực nâng được chỉ ra trên hình 4.13. ........
|
|
|
|
« Sửa lần cuối: 26 Tháng Mười Hai, 2014, 08:50:18 pm gửi bởi qtdc »
|
Logged
|
|
|
|
qtdc
Thượng tá
Bài viết: 3299
|
|
« Trả lời #66 vào lúc: 26 Tháng Mười Hai, 2014, 09:46:36 pm » |
|
(tiếp)Hệ thống tăng cường lực nâng sẽ cố định dòng đài phun và uốn lệch nó xuống dưới, đồng thời tăng lực nâng đến cao độ H/Dэ = 2. Gần boong tàu, nơi lực nâng có giá trị đặc biệt đối với máy bay VTOL, hệ thống tăng cường lực nâng làm tăng đáng kể lực nâng — hơn 10%. Lực nâng bổ sung này có thể được dùng để tăng tốc máy bay trong vùng ảnh hưởng của sân đậu, mà cũng để đối phó lại các tác động tiêu cực như hiện tượng hút khí xả.  Рис. 4.13. Изменение подъемной силы при различных углах крена палубы корабля: Рис. 4.13. Изменение подъемной силы при различных углах крена палубы корабля:
1 — с устройством увеличения подъемной силы; 2 — без устройства увеличения подъемной силы
Hình 4.13. Biến thiên lực nâng với các góc nghiêng ngang khác nhau của sàn boong tàu:
1- có thiết bị tăng lực nâng; 2- không có thiết bị tăng lực nâng Рис. 4.14. Изменение коэффициента момента крена при различных углах крена палубы корабля: Рис. 4.14. Изменение коэффициента момента крена при различных углах крена палубы корабля:
1 — без устройства увеличения подъемной силы; 2 — с устройством увеличения подъемной силы
Hình 4.14. Biến thiên hệ số mô men nghiêng ngang với các góc nghiêng ngang khác nhau của boong tàu:
1- không có thiết bị tăng lực nâng; 2- có thiết bị tăng lực nângThiết bị để tăng lực nâng hiệu quả khi góc nghiêng ngang của sàn boong lớn được trình bày trên hình 4.14. Tại độ cao lớn hơn độ cao sát-xi một chút, lực nâng cảm ứng sẽ mang dấu dương cho đến góc nghiêng ngang bằng 8°, mặc dù có giảm, có nghĩa là độ rộng của hệ thống tăng lực nâng đủ để cố định phần đáng kể của đài phun. Tuy nhiên, mô men nghiêng ngang của máy bay phản lại tác động của đài phun lên các tấm chắn dọc.  Рис. 4.15. Влияние вертикальной качки палубы корабля на величину подъемной силы СВВП Рис. 4.15. Влияние вертикальной качки палубы корабля на величину подъемной силы СВВП
Hình 4.15. Ảnh hưởng của dao động lắc thẳng đứng của boong tàu lên giá trị lực nâng máy bay VTOLẢnh hưởng của dao động lắc thẳng đứng của boong đến lực nâng phát sinh của mô hình khối tích cận âm được trình bày trên hình 4.15. Biên độ lắc theo phương thẳng đứng bằng 1,5 D, với hai dao động mỗi giây qua điểm trung hòa, bố trí ở độ cao tương ứng với lực nâng cảm ứng tối đa (H / De = 2). Như vậy, độ cao mô hình phía trên boong sẽ biến thiên theo hình sin từ H / De = 0,5 đến H / De = 3,5. Sự biến thiên lực nâng có hình dạng chu kỳ phức tạp và có độ lặp lại tốt. {286} Tại độ cao bằng độ cao của sát-xi H / De = 0,7 thì tổn thất lực nâng bằng 3% lực đẩy ban đầu trong các điều kiện tĩnh học trên mặt đất. Tùy theo mức cách xa boong của mô hình mà lực nâng cảm ứng đạt maksimum khi H / De = 2 và sau đó giảm nhẹ khi nó tiếp cận xấp xỉ tới H / De = 3,5. Tuy nhiên, theo mức độ tiếp cận của boong với mô hình mà lực nâng tối đa sẽ cao hơn 2% khi H / De = 2, hơn là khi cách xa boong. Điều này là do hiệu ứng nén hoặc sự xuất hiện "hiệu ứng gối đệm" bởi đài phun, do tốc độ di chuyển của boong (tốc độ di chuyển tối đa của boong là 1,9 m / s). Các thử nghiệm đã được tiến hành và tại các tần số khác nhau của dao động lắc boong theo phương thẳng đứng, để đo sự khác biệt trong các lực nâng cảm ứng, liên quan đến những thay đổi trong tốc độ di chuyển của boong và hiệu ứng nén sinh ra bởi đài phun.  Рис. 4.16. Влияние вертикальной качки палубы корабля на величину подъемной силы для плоской модели СВВП Рис. 4.16. Влияние вертикальной качки палубы корабля на величину подъемной силы для плоской модели СВВП
Hình 4.16. Ảnh hưởng của dao động lắc thẳng đứng của boong tàu lên giá trị lực nâng đối với mô hình phẳng của máy bay VTOLMô hình phần dưới của máy bay cho phép đánh giá tách biệt tác động của dao động lắc thẳng đứng lên lực đài phun. Khi thử nghiệm mô hình phần dưới, cũng như trong trường hợp mô hình ba chiều, lực đài phun gia tăng theo mức độ xích gần boong tàu. Các kết quả đó được trình bày trên hình 4.16, khẳng định giả thuyết rằng sự gia tăng lực nâng trước hết liên quan đến đài phun. Dao động lắc của boong là chuyển động có tần số và biên độ lớn nhất, mà do đó có thể có ảnh hưởng lớn nhất đến việc ứng dụng chiến đấu của máy bay VTOL. Ví dụ, các tàu loại {287} destroyer trong điều kiện ở vùng biển bão có dao động lắc boong khoảng ± 10 ° trong cả chu kỳ dao động toàn phần bằng 8 giây. Dao động lắc sống của boong đạt tới ± 2 °. Tuy nhiên, trong trường hợp này người ta đã nghiên cứu các biên độ dao động lắc mạn và lắc sống bằng nhau, vì giả định rằng máy bay VTOL cần phải hạ cánh và cất cánh ở bất kỳ sự định hướng nào đối với boong tàu. .........
|
|
|
|
« Sửa lần cuối: 26 Tháng Mười Hai, 2014, 11:25:17 pm gửi bởi qtdc »
|
Logged
|
|
|
|
qtdc
Thượng tá
Bài viết: 3299
|
|
« Trả lời #67 vào lúc: 28 Tháng Mười Hai, 2014, 08:54:47 pm » |
|
(tiếp)Những thay đổi của lực nâng cảm ứng và mô men xoắn ngang của mô hình cận âm do dao động lắc mạn với biên độ ± 10 ° ở độ cao H / De = 2 được trình bày trên hình 4.17. Khi có dao động lắc mạn thì sẽ có tổn thất lớn về lực nâng do việc giảm lực nâng của đài phun, đã được giải thích ở phần trên dựa trên cơ sở các kết quả thu được ở những góc nghiêng cố định của {288} boong tàu. Cũng như trong các điều kiện tĩnh học, sự mất mát lực nâng đi kèm theo mô-men nghiêng ngang (xoắn) gây mất ổn định. Trong các thử nghiệm động lực học, điểm phản ánh đài phun dao động thay đổi từ cánh này sang cánh khác.  Рис. 4.17. Влияние бортовой качки палубы корабля на величину подъемной силы и коэффициента момента крена СВВП Рис. 4.17. Влияние бортовой качки палубы корабля на величину подъемной силы и коэффициента момента крена СВВП
Hình 4.17. Ảnh hưởng của dao động lắc mạn của boong tàu đến giá trị lực nâng và hệ số mô men nghiêng ngang của máy bay VTOLNhững thay đổi của lực nâng cảm ứng và mô men nghiêng (xoắn) dọc khi dao động theo sống tàu với biên độ ± 10 ° được thể hiện trên hình 4.18. Tương ứng với các dữ liệu thu được ở những góc nghiêng cố định của boong (hình 4.10), tổn thất lực nâng là rõ ràng tại các góc nghiêng sống có giá trị dương của boong. Mô men nghiêng (chúi) dọc trở nên âm hơn (bổ nhào) với các góc nghiêng giá trị âm của sàn boong, có thể, do tăng hiện tượng hút ở phần mũi và sự dịch chuyển về phía sau của đài phun. Các dữ liệu động lực học, tuy nhiên, chỉ đến một mô men chúi dọc giá trị âm hơn khi các dữ liệu là tĩnh học. Ở các góc nghiêng của sàn boong giá trị dương, điều đó gắn với sự gia tăng "hiệu ứng đệm khí" của đài phun giữa hai ống xả phía sau (phía sau trọng tâm khối lượng), trong khi đó khi các góc nghiêng sàn boong có giá trị âm {289}, điều đó gắn với sự dịch chuyển đài phun xa hơn so với khi ở các góc nghiêng sống cố định của boong.  Рис. 4.18. Влияние килевой качки палубы корабля на величину подъемной силы и продольный момент СВВП Рис. 4.18. Влияние килевой качки палубы корабля на величину подъемной силы и продольный момент СВВП
Hình 4.18. Ảnh hưởng của dao động lắc sống của boong tàu đến giá trị lực nâng và mô men uốn dọc của máy bay VTOLKhi có tác động đồng thời của các tổ hợp khác nhau - dao động lắc theo chiều sống tàu, theo phương thẳng đứng và dao động mạn ta quan sát thấy một bức tranh phức tạp của sự phụ thuộc giữa biến thiên lực nâng theo thời gian (hình 4.19). Từ hình trên ta thấy rằng ngay cả khi hiện diện trường dòng xoáy hỗn loạn ở mức độ cao do sự dao động phức hợp của boong, ta quan sát thấy tính chất chu kỳ phức tạp của sự biến thiên lực nâng theo thời gian. Ảnh hưởng của cấu hình máy bay có thể thấy rõ từ các dữ liệu động lực học và về cơ bản phù hợp với các xu hướng được xác định trong quá trình thử nghiệm khi boong cố định. Ví dụ, trên hình 4.20 cho thấy sự phụ thuộc của biến thiên lực nâng vào chuyển động thẳng đứng của boong. Lực nâng cảm ứng tối đa {290} lớn hơn khoảng 12% so với khi đo được trong các thử nghiệm tĩnh học trong mối liên quan với sự gia tăng "hiệu ứng đệm khí" khi boong tiến gần đến mô hình. Các kết quả cũng cho thấy hệ thống tăng cường lực nâng có hiệu quả ngay cả ở các biên độ dao động lắc lớn, tương ứng với các dữ liệu tĩnh học. Các dữ liệu thu được tại các vị trí cố định của boong tàu, được sử dụng để tính toán những thay đổi lực nâng cảm ứng và mô-men xoắn tùy thuộc vào sự di chuyển của boong, khi tính rằng chuyển động có thể được xem xét như trạng thái giả tĩnh (quasi static). Có thể thực hiện tính toán cho chuyển động này bằng cách xác định sự thay đổi chiều cao, các góc nghiêng sống và nghiêng mạn của boong theo thời gian và thu được, theo dữ liệu đối với trạng thái cố định, các biến thiên tương ứng của các hiệu ứng khí động học cảm ứng.  Рис. 4.19. Изменение подъемной силы СВВП по времени при одновременном действии вертикальной, бортовой и килевой качек Рис. 4.19. Изменение подъемной силы СВВП по времени при одновременном действии вертикальной, бортовой и килевой качек
Hình 4.19. Biến thiên lực nâng của máy bay VTOL theo thời gian khi có tác động đồng thời của dao động lắc sống, lắc mạn và lắc thẳng đứngSo sánh các tính toán dựa trên các dữ liệu cho boong cố định với các dữ liệu động lực học cho chuyển động tịnh tiến, chỉ ra rằng các kết quả phù hợp khá tốt. Ngoại lệ là sự gia tăng {291} "hiệu ứng đệm khí" của đài phun, diễn ra khi boong tiến gần tới mô hình. Một so sánh tương tự như vậy được thực hiện đối với mô hình có bố cục siêu âm. Đối với mô hình này, ảnh hưởng đáng kể đến lực nâng cảm ứng là hiệu ứng hút mạnh do giá trị lớn của tỷ số giữa diện tích mô hình trên mặt bằng với diện tích dòng khí xả. Mặc dù khi H / De = 0,8 thì giá trị lực nâng trùng khớp tốt, khi H / De> 1,6 các dữ liệu động lực học phản ánh sự mất mát lực nâng, lớn hơn đáng kể so với tính toán (khoảng 8%). Điều đó gắn với sự tăng cường hiện tượng hút, do chuyển động của boong so với mô hình. Tác động tiêu cực này không quan sát thấy ở mô hình cận âm, có thể là do hiệu ứng hút khá thấp, và đài phun mạnh. Do có bằng chứng rõ ràng về tăng lực nâng đài phun khi boong chuyển động về phía mô hình, sẽ là hợp lý khi ta hy vọng khi boong chuyển động ra xa mô hình sẽ có sự giảm lực nâng, đặc biệt khi hiệu ứng hút chiếm ưu thế so với lực nâng cảm ứng. ........
|
|
|
|
« Sửa lần cuối: 29 Tháng Mười Hai, 2014, 11:19:21 pm gửi bởi qtdc »
|
Logged
|
|
|
|
qtdc
Thượng tá
Bài viết: 3299
|
|
« Trả lời #68 vào lúc: 29 Tháng Mười Hai, 2014, 10:42:59 pm » |
|
(tiếp)So sánh các tính toán với các dữ liệu động lực học đối với dao động lắc mạn boong ở bố cục siêu âm, cho thấy có sự khác biệt lớn nhất trong lực nâng cảm ứng, và quan sát được tác động tiêu cực đáng kể của dao động lắc mạn boong đến mô men nghiêng ngang cảm ứng. Sự khác nhau trong những đại lượng này có ý nghĩa quan trọng để đưa ra yêu sách đối với công suất điều khiển khí động lực và cấu trúc hệ thống điều khiển. Trạng thái của biển có thể rất khác nhau và gây ra dao động lắc phức tạp của con tàu. Vì vậy, người ta đã nghiên cứu một số phương án tổ hợp dao động lắc mạn, lắc sống, lắc đứng, trước hết với bố cục cận âm. Dưới tác động đồng thời của dao động lắc thẳng đứng và lắc mạn (trong một pha) lực nâng cảm ứng thực tế thấp hơn tính toán theo điều kiện tĩnh học. Người ta cho rằng trường dòng chảy rối vô cùng phức tạp, tạo nên khi có các chuyển động phức, sẽ tăng cường sự dịch chuyển và lôi cuốn không khí xung quanh cùng chuyển động, cũng như làm yếu hiệu ứng đài phun, đồng thời tăng tổn thất lực nâng. Sự thay đổi mô men nghiêng ngang khi chuyển động mạnh mẽ chỉ ra rằng sự thay đổi các đỉnh lớn hơn tính toán một chút. {292}  Рис. 4.20. Зависимость увеличения подъемной силы СВВП от вертикального движения палубы корабля при наличии эффективной системы Рис. 4.20. Зависимость увеличения подъемной силы СВВП от вертикального движения палубы корабля при наличии эффективной системы
Hình 4.20. Quan hệ phụ thuộc của sự tăng cường lực nâng của máy bay VTOL vào chuyển động thẳng đứng của boong tàu khi có hiện diện hệ thống hiệu quảSo sánh tương tự cho tổ hợp dao động lắc mạn và sống với sự sai khác pha 90° chỉ ra rằng sự thay đổi lực nâng cảm úng thấp hơn đáng kể so với tính toán. Những kết quả này cho thấy tầm quan trọng của các hiệu ứng tiêu cực liên quan đến sự gia tăng xáo trộn hỗn loạn trong chuyển động hỗn hợp. Biến chuyển lực đài phun phần nào giải thích sự khác biệt giữa các dữ liệu tính toán và thực nghiệm. Điều này có thể chứng minh bằng cách kết hợp những thay đổi lực nâng, đo đạc thực nghiệm trên mô hình phẳng của phần dưới máy bay có hiệu ứng hút được tính toán trên cơ sở dữ liệu tĩnh học. Có sự phù hợp khá tốt giữa những thay đổi này của lực nâng cảm ứng và các dữ liệu động lực học thu được đối với mô hình khối tích ba chiều. Thủ tục tương tự cũng được sử dụng khi tính toán sự thay đổi lực nâng trong điều kiện lắc mạn của boong tàu, và đưa đến sự phù hợp khá tốt trong các kết quả. Như vậy, các xu hướng chính trong ảnh hưởng của dao động lắc của tàu gây ra cho các hiệu ứng khí động học cảm ứng có thể được trình bày nhờ các dữ liệu thử nghiệm tĩnh học. Tuy nhiên, tính toán dựa trên những dữ liệu này thường là quá lạc quan, đặc biệt là trong trường hợp boong có chuyển động kết hợp phức tạp. Kết quả này rất quan trọng, vì các nghiên cứu ảnh hưởng lắc do nguyên nhân chi phí và đơn giản hóa nên thường được tiến hành trong điều kiện tĩnh học. Rõ ràng, việc sử dụng những dữ liệu này đối với các điều kiện động lực học có thể dẫn đến việc hạ thấp các yêu cầu về công suất điều khiển và đánh giá thấp tổn thất lực nâng của máy bay VTOL. Để giảm thiểu các hoạt động bất lợi của dòng khí thải động cơ máy bay VTOL trên bề mặt các đường băng, trên máy bay và lọt khí xả nóng tới lối vào động cơ, cũng như để đảm bảo sự cất cánh và hạ cánh trên boong tàu khi nó dao động lắc, công ty "British Aerospace" đề xuất một hệ thống cất cánh và hạ cánh mới cho máy bay cất cánh và hạ cánh thẳng đứng kiểu "Harrier", được gọi là "Sky Hook". Hệ thống "Sky Hook" được thiết kế để bố trí trên các tàu có lượng choán nước 2.000 .... 4000 tấn, đảm bảo cất cánh và hạ cánh cho các máy bay cất cánh và hạ cánh thẳng đứng từ các tàu trên, với độ lắc mạn ± 15 °, lắc sống đến ± 7 ° và chuyển động thẳng đứng của boong đến mức ± 5 m. Ý tưởng của "Sky Hook" sinh ra do sự khó khăn trong việc hạ cánh trên boong tàu chao đảo lắc mạnh, với {293} sự nguy hiểm của thời điểm cất cánh, khi máy bay VTOL không còn được gắn chặt trên boong tàu, mà cũng chưa tách khỏi sàn boong lắc đảo bập bềnh.  Рис. 4.21. Новая система для обеспечения взлета и посадки СВВП «Харриер» с палубы небольших кораблей типа «Скай Хук» Рис. 4.21. Новая система для обеспечения взлета и посадки СВВП «Харриер» с палубы небольших кораблей типа «Скай Хук»
Hình 4.21. Hệ thống mới đảm bảo CHC cho máy bay VTOL "Harrier" từ boong các tàu nhỏ kiểu "Sky Hook"Hệ thống "Sky Hook" bao gồm: một cần cẩu với cánh tay đòn quay được (hình4.21); hệ thống con ổn định cần cẩu; cơ cấu móc kẹp máy bay và khóa đặt cuối cánh tay đòn cầu trục; nút liên kết cứng bố trí trên thân máy bay ở tâm trọng lực của máy bay; máy tính điện tử, hệ thống quang học và các thiết bị đảm bảo neo, docking và undocking máy bay bằng cần cẩu. Bản thân cần trục là một cấu trúc kim loại bằng ống thép hàn nặng 9 ... 13 tấn. Nó được tính toán thiết kế để tiếp nhận các máy bay có trọng lượng lên tới 13.600 kg. Hệ thống con giữ ổn định đảm bảo trong thời gian ghép nối cho hoạt động của cẩu khi mà lắc mạn là ± 15 ° và lắc sống ± 7 °. Tay cần cầu trục thực hiện di chuyển theo đường elip, còn các cảm biến quán tính sẽ ổn định đầu cầù trục trong không gian. Việc điều khiển đầu cần thực hiện bằng hệ thống thủy lực. Đầu cầu trục bao gồm trong nó thiết bị móc nâng và gắn với nó những khớp các-đăng treo, hệ thống xác định trạng thái của thiết bị móc nâng và các gối tựa cố định (hình 4.22). Đầu cầu trục hệ thống "Sky Hook" có một thanh mà phần di động của nó dịch chuyển trên đó có các gối tựa cố định. Tại phần cuối thanh có một phễu tiếp nhận cùng móc nâng.  Рис. 4.22. Головка крана системы «Скай Хук» Рис. 4.22. Головка крана системы «Скай Хук»
Hình 4.22. Đàu cần trục hệ thống "Sky Hook"Việc hạ cánh (tiếp thu) máy bay lên tàu với sự giúp đỡ của {294} hệ thống "Sky Hook" diễn ra như sau (hình 4.23). Tay cần cầu trục nhờ dẫn động thủy lực sẽ quay vuông góc mạn tàu, và cơ cấu docking qua hệ thống điều khiển điện tử sẽ được giữ ổn định trong không gian. Phi công chuyển máy bay từ đường bay nằm ngang sang chế độ bay treo, đồng thời dịch chuyển máy bay dọc theo mạn tàu nhờ máy ngắm hướng xạ, đi vào cái gọi là cửa sổ ghép nối kích thước 3 × 3 × 3 m, trong phạm vi đó hệ thống quang học theo các dấu hiệu đặt ở thân trên máy bay, phát hiện đầu dò ghép nối của máy bay, đo góc và khoảng cách đến nó và tự động vào đúng thời điểm sẽ bung thanh nối ghép ra. Cơ cấu của thanh nối sẽ tham gia tiếp xúc với đầu dò ghép nối và bắt lấy nó, điều đó được khẳng định bởi một tín hiệu ánh sáng. Sau đó phi công sẽ giảm 5-10% lực đẩy của động cơ đến giá trị tối thiểu, để máy bay vẫn điều khiển được theo cả ba trục. Tiếp theo, thanh docking sẽ kéo máy bay đến các gối tựa ổn định sẽ cố định nó vào chỗ thật chắc chắn.  Рис. 4.23. Прием (посадка) самолета вертикального взлета и посадки на корабль с помощью системы «Скай Хук»: Рис. 4.23. Прием (посадка) самолета вертикального взлета и посадки на корабль с помощью системы «Скай Хук»:
А — причаливание; Б — захват; 1 — фиксирующие упоры; 2 — штанга; 3 — узел стыковки со штангой на самолете
Hình 4.23. Tiếp thu (hạ đặt) máy bay CHC thẳng đứng trên tàu nhờ trợ giúp của hệ thống "Sky Hook":
A- vào bến bãi; B- móc bắt; 1- các cữ cố định. 2- thanh ghép nối; 3- nút ghép nối với thanh nối trên máy bay........
|
|
|
|
« Sửa lần cuối: 31 Tháng Mười Hai, 2014, 08:54:28 pm gửi bởi qtdc »
|
Logged
|
|
|
|
qtdc
Thượng tá
Bài viết: 3299
|
|
« Trả lời #69 vào lúc: 03 Tháng Giêng, 2015, 01:29:27 am » |
|
(tiếp)Phi công đưa máy bay vào khu vực hoạt động của đầu chụp bắt, trong khi định hướng nhờ thiết bị quan trắc thị sai, gắn trên cánh tay cần của cầu trục. Thiết bị quan trắc gồm một đĩa nền trắng và hai thanh màu đen gắn với tấm đĩa nền. Nếu máy bay đang ở vị trí đúng đối với máy ngắm, phần màu đen trên đĩa nền cần phải thẳng hàng với hai thanh. Nếu máy bay có vị trí quá cao hoặc quá thấp, hoặc hơi nhô về phía trước, hoặc lùi về phía sau, phần màu đen sẽ không thẳng hàng với các thanh (hình 4.24).  Рис. 4.24. Индикация положения самолета относительно визирного устройства при приеме СВВП на корабль: Рис. 4.24. Индикация положения самолета относительно визирного устройства при приеме СВВП на корабль:
а — самолет находится слишком низко; б — самолет немного сзади заданного положения; в — оптимальное положение самолета для захвата
Hình 4.24. Chỉ dẫn vị trí máy bay đối với máy ngắm khi tiếp thu máy bay VTOL trên tàu chở máy bay:
a- máy bay nằm ở vị trí quá thấp; b- máy bay hơi bị lùi về phía sau vị trí quy định; v- tư thế tối ưu của máy bay để chụp bắtCác nghiên cứu được thực hiện nhằm tạo ra một hệ thống đảm bảo chỉ dẫn chính xác hơn vị trí của máy bay thông qua việc chuyển tất cả các thông tin lên màn hình chỉ thị của phi công, anh ta khi sử dụng thông tin này, sẽ đặt máy bay ở cự ly cách 5-6 m về phía sau vùng chụp bắt, sau đó có thể sử dụng máy ngắm sẵn có lúc bấy giờ {296}. Khi máy bay đi vào vùng chụp bắt thì hệ thống IR tự động sẽ phát hiện sự hiện diện của nó và lệnh cho thiết bị nâng cố định để móc và chụp bắt trục cam tiếp thu máy bay. Toàn bộ hệ thống hoạt động tự động mà không cần sự trợ giúp của thao tác viên. Hệ thống được cung cấp bởi công ty "Hệ thống Robotics Anh", sử dụng cảm biến hình ảnh hồng ngoại gắn trên đầu cần cẩu. Cảm biến sẽ đánh giá đặc tính của các kính ảnh (hấp thụ bức xạ hồng ngoại), đặt ở bề mặt trên của máy bay dưới dạng các hình dạng hình học màu đen và màu trắng (hình vuông và hình tròn), và sau khi nhận được thông tin về kích thước và tương quan của chúng, {297} sẽ tính toán vị trí của máy bay đối với đầu cần cẩu. Những dữ liệu này sẽ được chuyển đổi thành tín hiệu điện cho thiết bị nâng, đảm bảo móc được vấu tiếp thu máy bay. Sau đó, phi công giảm lực đẩy, trong khi vẫn duy trì vị trí không gian của máy bay nhờ hệ thống điều khiển phản lực. Thiết bị nâng sẽ chụp bắt chiếc máy bay đang treo và kéo nó vào ụ cố định. Tiếp theo cơ chế khóa nội bộ sẽ được bật lên và động cơ có thể chuyển sang chế độ ga nhỏ, nếu máy bay chỉ tiếp bổ sung nhiên liệu, hoặc tắt máy nếu máy bay được gửi vào nhà chứa máy bay phía dưới boong tàu và được đặt lên khung lăn hoặc cầu xếp dỡ. Thủ tục tiếp theo phụ thuộc vào tính chất của hoạt động sắp tới: tiếp bổ sung cho máy bay chỉ nhiên liệu và nước; gắn vũ khí và tiếp toàn bộ nhiên liệu và nước; di chuyển máy bay vào nhà chứa máy bay. Trong trường hợp đầu tiên, việc tiếp bổ sung được làm ngay sau khi lắp ghép với cần cẩu mà không tắt động cơ, chỉ chuyển sang chế độ gaz nhỏ cho đến khi hoàn thành việc tiếp tế, thực hiện nhờ hệ thống đường trục cung cấp lắp đặt ngay trong cần trục. Tốc độ bơm truyền nhiên liệu khoảng 500 kg / phút, thời gian tiếp là 5 phút. Trong trường hợp thứ hai, động cơ tắt sau khi lắp ghép và máy bay được hạ xuống cầu xếp dỡ di động của sân đậu boong tàu, tại đó tiến hành các công việc cần thiết liên quan đến công tác gắn treo vũ khí và nạp nhiên liệu. Cần cẩu được giữ ổn định vị trí so với tàu. Để treo vũ khí cần 10 phút. Trường hợp thứ ba, chiếc máy bay đã hạ xuống cầu xếp dỡ sẽ được di chuyển vào nhà chứa máy bay. Việc cất cánh (nâng) máy bay khỏi tàu và tháo kết nối nó với cầu trục tiến hành theo thứ tự ngược lại. Máy bay chuẩn bị đi làm nhiệm vụ đang ở trên cầu xếp dỡ sẽ được di chuyển đến vị trí xuất phát, được móc vào cần cẩu và giải phóng khỏi cầu xếp dỡ. Sau đó, cần cẩu được ổn định trong không gian, máy bay được đưa ra mạn tàu và phi công khởi động động cơ trong trạng thái góc lệch vòi xả là 90°. Thanh docking sẽ hạ máy bay xuống dưới và giải phóng nó khỏi các gối tựa ổn định. Phi công chuyển động cơ sang chế độ lực đẩy tối đa, cân bằng nó với trọng lực của máy bay. Cơ cấu chụp bắt thanh docking sẽ được ngắt kết nối với đầu dò lắp ghép, và máy bay có thể tách khỏi tàu trong chế độ bay treo với việc chuyển tiếp sang đường bay nằm ngang. {298} Trên các tàu có độ choán nước 2000 ... 4000 tấn có thể lắp đặt hai cần cẩu. Trong hangar của tàu có kích thước 16,8 × 15,8 × 5,5 m có thể chứa bốn máy bay cất cánh và hạ cánh thẳng đứng hoặc cất-hạ cánh ngắn, hai trực thăng chống tàu ngầm "Sea King", 300 tấn nhiên liệu và vũ khí hàng không. Hệ thống "Sky Hook" đảm bảo cất cánh cho bốn máy bay khi sử dụng cả 2 cầu trục trong vòng 2 phút và tiếp thu máy bay trong vòng 4 phút. Hệ thống được thiết kế để đảm bảo hoạt động từ tàu cho các máy bay "Harrier-GR.3» (A-8A), «Sea Harrier-FRS.1» và AV-8B «Harrier» với những thay đổi tối thiểu trong cấu trúc của chúng. Theo số liệu báo chí Anh, máy bay hoạt động không có khung bệ, nhưng cũng có thể làm việc với nó, chỉ có điều trong trường hợp này khối lượng của nó tăng lên khoảng 900 kg. Người ta cho rằng việc sử dụng các hệ thống mới có những ưu điểm sau: tiết kiệm nhiên liệu trong quá trình cất cánh và hạ cánh, giảm biên chế nhân viên bảo dưỡng kỹ thuật cho máy bay, cải thiện các đặc tính cất cánh và hạ cánh do không bị ảnh hưởng của hiệu ứng mặt đất và sự tái tuần hoàn khí thải, ít rủi ro hơn và chi phí thấp trong phát triển hệ thống (không đòi hỏi công nghệ mới). Trong quá trình công ty trên tiến hành các chuyến bay thử nghiệm trên bãi thử, mối quan tâm chủ yếu tập trung vào các vấn đề về sự dịch chuyển ngang có thể có của máy bay "Harrier" trong chế độ treo trong "cửa sổ" docking có sử dụng cần trục mặt đất, máy ngắm hướng xạ và các thiết bị trợ giúp khác. Các kết quả thử nghiệm, mà trong đó có ba phi công tham gia, được đánh giá tích cực. Tại tốc độ gió 10 m / s (gió ngược thổi tới dưới góc 60°), máy bay trong chế độ treo đã bị dịch chuyển tương đối so đầu mút cánh tay cần cầu trục với tốc độ không quá 0,3 m / s. Theo thông tin của báo chí Anh, người ta cũng đang lên kế hoạch sản xuất một mẫu cần cẩu có cơ cấu ghép nối và thực hiện các thử nghiệm bay của nó trên một con tàu ngoài biển trong các điều kiện thời tiết khác nhau. HẾT CHƯƠNG 4 ........
|
|
|
|
« Sửa lần cuối: 03 Tháng Giêng, 2015, 12:54:31 pm gửi bởi qtdc »
|
Logged
|
|
|
|
|


